





【方案分享】关于工业机器人机械手弧焊工作站方案(上篇)

第一章 方案概述
项目条件和要求
焊接工件名称:箱体总成最大 1000mm*1000mm*1800mm(W*L*H)(长度、宽度和高度均有变化)。
材料:不锈钢;厚度:δ=3 mm;
焊接方法:机器人MAG焊接方式;
设备规划:
配置1套机器人及MAG焊接系统、1套机器人滑台、1台单轴变位机, 1套机器人焊接夹具,激光检测和跟踪系统等。具体见设备布局参考图。
第二章 焊接工艺分析
箱体工序划分:
工序1、人工点固工件(组焊夹具甲方设计制造,甲方自备焊接设备,箱体共4个部件);
示图:

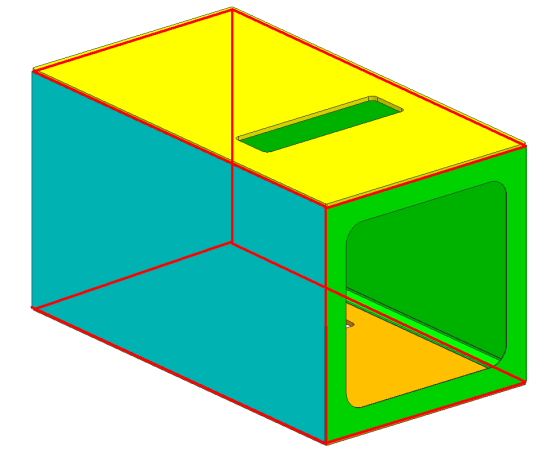
工序2、人工将工件装在变位机夹具上,机器人焊接。焊接完成后人工卸件。
示图:机器人焊接如图所示的焊缝
2.焊接工艺(MAG):
1)焊丝直径选用Φ0.8-Φ1.0mm;
2)机器人MIG焊接的平均焊接速度取:6-8 mm/秒;
3)每条焊缝的机器人焊接辅助时间,即机器人平均移动时间取:3秒(包括机器人变换姿态、加减速、空程运动时间,及焊接起弧、收弧时间);
第三章 系统总体方案
方案总体介绍
本方案采用KUKA KR16L/6机器人和弗尼斯的TPS4000焊接系统,通过sevorobot的DIGI-I激光传感器检测焊缝的位置进行焊接,并增加激光跟踪系统随时对焊接进行修正。
机器人夹具放在单轴变位机上,机器人安装在外部轴滑台上,保证焊接的姿态。
经过仿真:目前需用的机器人基本上可以满足最长1800的焊接。
关于夹具能适应多品种的问题:目前认为一套夹具可以通用,由于工件宽度及高度变动范围太大,为了适应有些型号的工件焊接,需要手工更换夹具上的部分底座。
2.设备布局参考图
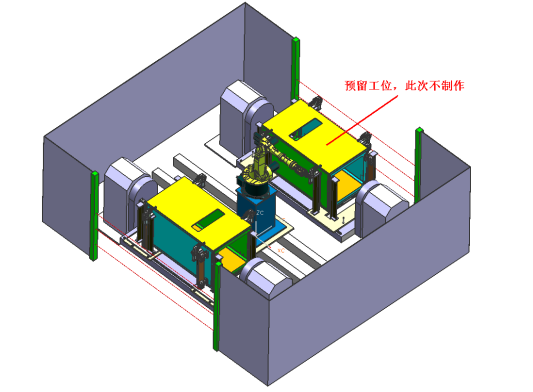

平面布局图
设备按1套机器人夹具制造,在电控系统上按照2套夹具的输入输出数量预留接口。
第四章 系统设备配置表

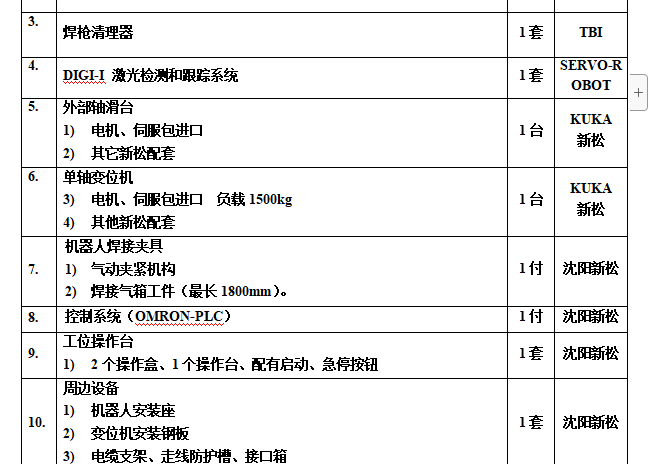

第五章 设备配置说明
机器人系统 KR16L/6
本系统所选用的KR16L/6机器人是德国库卡的机器人,包括机器人本体,机器人控制柜(KRC2),示教盒(KCP)三部分及供电电缆。
1)机器人本体参数:

KR16L/L机器人本体照片
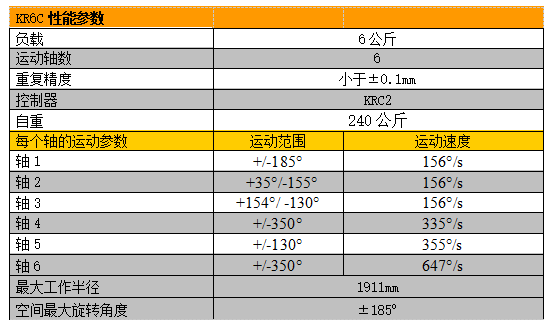

KR16L/6机器人本体外形尺寸及运动范围

好的文章,需要您的鼓励
17

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00 -
发那科机器人的信号种类?
标签: 发那科机器人,IO信号 提问:小马 2025-03-10 15:00:00 -
弧焊机器人有什么性能标准和要求?
标签: 弧焊机器人 提问:小常 2025-03-05 15:00:00
沈阳新松机器人自动化股份有限公司
 7年
7年



- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2023-04-03 13:17:03
- 2022-11-29 08:05:05
- 2022-08-30 09:03:10
- 2022-12-20 16:37:39
- 2025-03-05 15:00:00
- 2022-08-03 10:20:40
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









