





PR1400机器人腕部危险姿态分析

ADAMS软件进行动力学分析的主要目的是获取机器人各部件不同姿态下的受力,为后续的有限元分析提供边界条件。分析PR1400型焊接机器人的结构特点可知,各部件的最大受力部位为各关节处。其中,腕部的受力与JS轴的转动相关,小臂的的受力受J4轴的转动影响,肘部关节的受力与J3轴的转动相关。气而大臂、肩部的受力与肘部J3轴的转动以及大臂J2轴俯仰均相关,因此需要进行J2轴与J3轴的联合仿真。J1轴是在水平面内的旋转,仅对机器人姿态产生影响。各关节设计转动角度如表2.2所示,需要注意的是ADAMS中规定逆时针方向为负,顺时针方向为正,与机器人设计角度方向相反。

(1)腕部危险姿态确定
腕部(J5轴)的设计运动范围为-60度到210度,而且其不同时刻其受到的力与力矩均不同,因此需要遍历其整个设计运动范围。仿真开始位置设置为腕部的上限位点即210度的位置,驱动速度为1°/s,则仿真时间设为270s。腕部(J5轴)仿真驱动设置如图所示,由于ADAMS中规定逆时针方向为负,顺时针方向为正,与机器人设计角度方向相反,图2.12中设置的-210度的位置即为腕部上限位。仿真结束后得到如图2.13所示腕部不同姿态下所受力与力矩曲线。


由图中数据可知,腕部所受力与力矩均成类正弦曲线变化,力的幅值变化较小仅为0.0007N,力矩幅值变化很大,而且两者极值出现在不同时刻。综合考虑力矩与力大小,当腕部转动过120s,此时腕部所受力矩最大,为腕部危险姿态,此时腕部处于水平位置。
(2)腕部危险姿态下受力分析
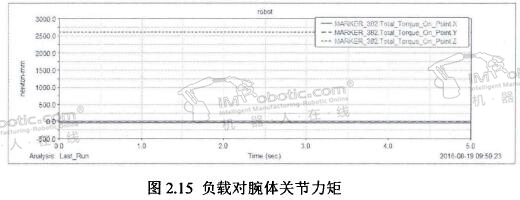
腕部位于水平位置时主要承受末端负载对其的作用力、力矩以及自身的重力。自身重力己知,只需测出此姿态下负载对腕部的作用力即可。将其调水平位置,仿真得到负载(包括法兰)对腕部的作用力如图2.14所示,力矩曲线如图2.15所示。
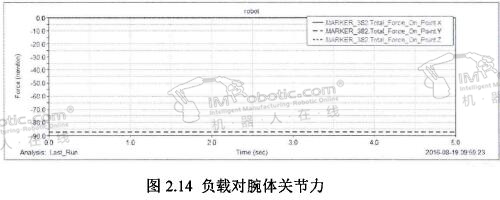
由图2. 14可知当腕部处于危险姿态时,负载对腕部X轴方向作用力为0N, Y轴方向作用力为-86.98N, Z轴方向作用力为0N。
焊接机器人由图2. 15可知负载对腕部X轴方向作用力矩为-36.88N.mm, Y轴方向作用力矩为0N.mm, Z轴方向作用力矩为2618.9165N.mm。其中负号表示力矩方向为逆时针,反之为顺时针。

好的文章,需要您的鼓励
14

- 最新资讯
- 最新问答
-
智能仓储系统的构成包括什么?有哪些特点?
关键字: 智能仓储 智慧物流 2025-05-15 -
微型压力传感器的原理是什么?有哪些应用?
关键字: 传感器 压力传感器 鑫精诚 2025-04-03 -
立体库堆垛机是什么?有哪几种类型?
关键字: 堆垛机 立体仓库 2025-03-24 -
埋弧焊是什么焊接方法?有什么特点?
关键字: 弧焊 埋弧焊 2025-03-17 -
AGV小车是什么?有哪些分类及特点?
关键字: agv小车 2025-03-12
-
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00 -
发那科机器人的信号种类?
标签: 发那科机器人,IO信号 提问:小马 2025-03-10 15:00:00 -
弧焊机器人有什么性能标准和要求?
标签: 弧焊机器人 提问:小常 2025-03-05 15:00:00

- 2021-06-10 10:45:45
- 2021-06-11 13:34:28
- 2020-05-29 10:03:22
- 2019-09-24 11:19:01
- 2020-01-16 13:27:13
- 2019-10-08 09:43:45
- 2022-08-16 15:24:08
- 2022-09-04 12:21:15
- 2022-09-07 14:44:11
- 2022-09-12 21:10:37
- 2022-12-06 16:27:14
- 2022-08-03 10:20:40
- 2025-05-15
- 2025-04-03
- 2025-03-24
- 2025-03-17
- 2025-03-12
- 2025-03-05
- 2025-02-27
- 2025-02-19
- 2025-02-18
- 2025-02-10









