





“零压力差”吸盘,爬壁机器人牢牢黏住墙

浙江大学的研究人员发明了一种新的真空吸力装置爬墙机器人穿越任何表面。
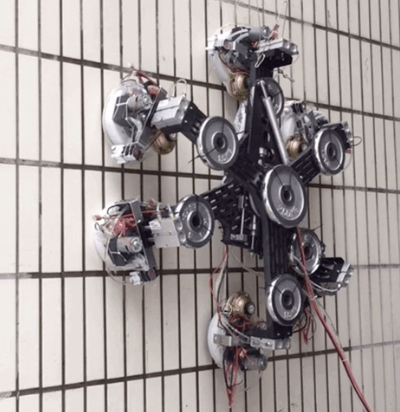
虽然已经有动力吸盘装置允许人们或机器人爬墙,但它们只能在光滑的表面上工作。传统的真空吸力装置由于真空泄漏而在粗糙或变形的表面失效。我国研究人员已经开发出了一种通过旋转水粘附在粗糙表面上的系统。新的吸力方法旨在解决这个问题。这种技术被称为“零压力差”(ZPD)。这项研究是出版本月早些时候发表在科学杂志《流体物理学》上。
“为了消除真空区边界的压差,边界处的压力必须等于大气压,而在真空区保持高真空,”由李昕和史凯歌带领的一个浙江大学研究团队在他们的研究论文中写道。因此,科学家们希望在吸盘的边界线附近建立一个稳定的压力梯度。由于在新系统中消除了这种差异,所以无论表面如何纹理化,都不会发生此类泄漏。而且,与传统系统相比,ZPD所需要的额外功能是维持给定吸力所需的动力要少得多。整个单元也比传统模型更小,更轻。
如下图所示,他们的ZPD方法使用真空区外部的一层旋转水来产生压力梯度。在水层内部,有一个很高的真空。压力呈径向增加,达到与水层外大气压力相同的水平。由于边界没有压差,真空泄漏的第二个条件就被打破了。

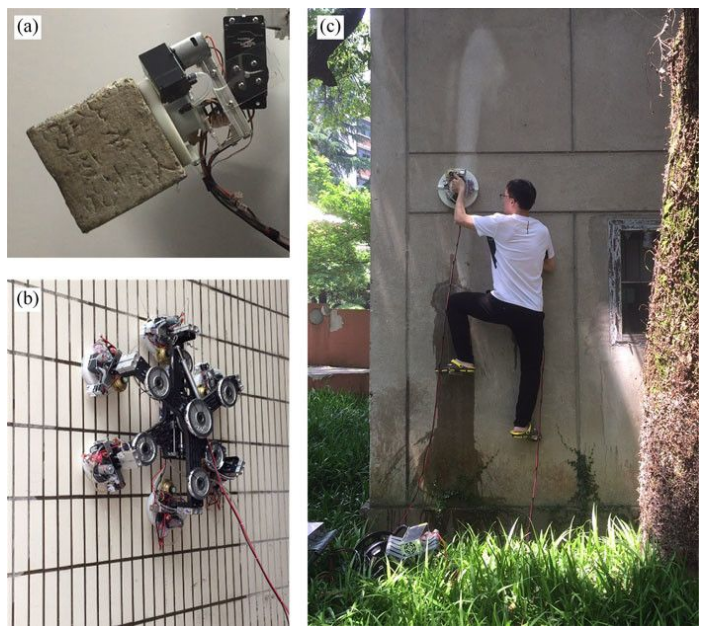
研究人员设计了一个新的吸盘,考虑到他们的零压差法,调整器和抽吸单元都是3D打印的。类似于其他吸入单元,一个腈泡沫橡胶环嵌入在腔的外部外围。电机驱动的风扇安装在房间里。一个微型真空泵被用来疏散最初的空气,在室内形成一个真空区.水库里的水是由外部水源供应的。
“与其他攀爬机器人相比,带有我们基于ZPD的吸盘单元的机器人在性能上实现了令人惊讶的提升,”李昕说道。“这项研究的下一步是减少水的消耗。如果可以减少水的消耗,则吸盘装置将在少量水的情况下工作很长时间,以便攀岩机器人可以自己携带水而不是连接到电源。”
为了让新一代爬壁机器人茁壮成长,像史和李这样的研究人员必须找到一种方法,让机器人将任何必要的水储存在仪器内,而不是将机器与供水系统连接起来。这在商业上是否可行尚不清楚。但就目前而言,科学是坚持的,继续研究下去肯定会有成果。

好的文章,需要您的鼓励
16

- 最新资讯
- 最新问答
-
“机器人关节”被TA硬控了
关键字: 美的工业 rv减速机 2024-10-16 -
未来已至:Figure 02机器人引领AI硬件新时代
关键字: 人形机器人 2024-08-13 -
配天观点:具身智能商业化落地之路,道阻且长,但行则必至!
关键字: 配天 具身智能 2024-08-09 -
具身智能:人工智能新纪元,赋能未来科技新引擎
关键字: 具身智能 泰科机器人 2024-07-25 -
科技与艺术交融,BrainCo智能仿生手亮相北京中国国家博物馆丨设计智造与高质量发展特展
关键字: 强脑科技 智能仿生手 2024-07-22
-
激光焊接机器人的特点有哪些?
标签: 激光焊接机器人,焊接机器人,工业机器人 提问:小T 2025-04-15 11:02:00 -
工业机器人码垛原理是什么?
标签: 码垛机器人,工业机器人 提问:晓明 2025-03-24 12:00:00 -
什么是自动焊接和半自动焊接?
标签: 焊接,焊接机器人 提问:小君 2025-03-18 09:00:00 -
发那科机器人的信号种类?
标签: 发那科机器人,IO信号 提问:小马 2025-03-10 15:00:00 -
弧焊机器人有什么性能标准和要求?
标签: 弧焊机器人 提问:小常 2025-03-05 15:00:00

- 2024-08-09 15:55:07
- 2022-01-12 09:56:12
- 2019-12-20 17:31:37
- 2019-03-25 14:41:44
- 2019-07-05 13:37:10
- 2019-02-27 16:02:02
- 2023-06-12 10:16:18
- 2023-12-01 11:30:49
- 2022-10-19 12:13:03
- 2022-10-14 07:55:37
- 2023-07-01 10:22:24
- 2022-10-13 12:23:45
- 2024-10-16
- 2024-08-13
- 2024-08-09
- 2024-07-25
- 2024-07-22
- 2024-07-18
- 2024-07-18
- 2024-07-18
- 2024-01-29
- 2024-01-16









